

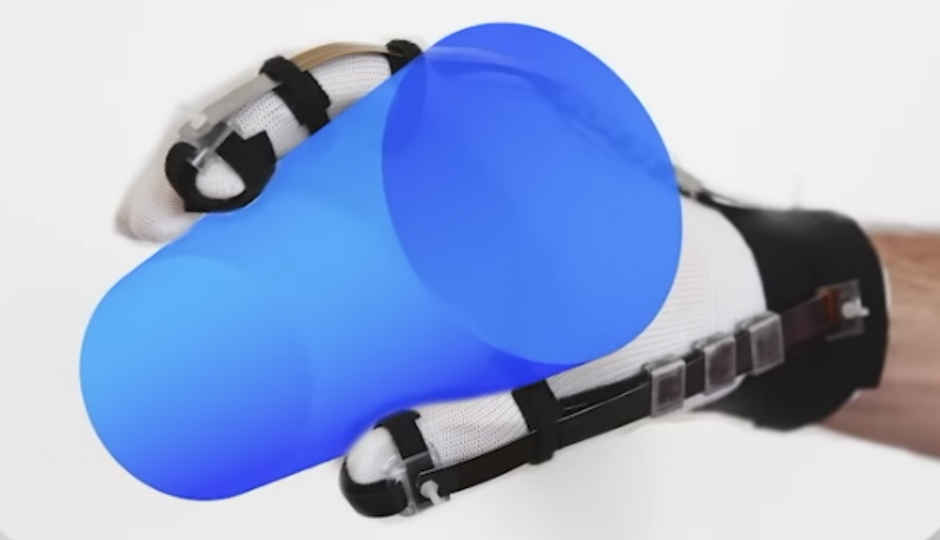
 Virtual reality is about to get a lot less virtual and a lot more real. A new haptic glove developed by scientists from ETH Zurich and EPFL enables its wearers to feel and manipulate virtual objects. The glove weighs less than 8 grammes but provides haptic feedback that is extremely realistic, reads a press release from ETH Zurich. When worn in sync with a suitable virtual reality programme, the haptic glove is supposed to react like a real glove that’s touching real objects. Designed primarily for scientists, the glove is named DextrES.
Virtual reality is about to get a lot less virtual and a lot more real. A new haptic glove developed by scientists from ETH Zurich and EPFL enables its wearers to feel and manipulate virtual objects. The glove weighs less than 8 grammes but provides haptic feedback that is extremely realistic, reads a press release from ETH Zurich. When worn in sync with a suitable virtual reality programme, the haptic glove is supposed to react like a real glove that’s touching real objects. Designed primarily for scientists, the glove is named DextrES. The glove is capable of generating up to 40 newtons of holding force on each finger. To achieve this, the glove needs only a few milliwatts of power at 200 volts. This means it has the potential to run off a small battery as well. Combined with its minimalistic form factor and low thickness of 2 millimetres, it is said to offer an enormous amount of precision and freedom of movement. According to the press release, DextrES is made of cotton, with thin elastic metal strips running along the fingers. These strips are separated by a thin insulator. When the wearer touches an object virtually the internal controller applies a voltage difference between the metal strips. This causes the strips to stick to one another because of electrostatic attraction. This then creates a braking force that obstructs the movement of the finger on which voltage is applied.
The obstruction of finger movement is removed when the voltage is no longer applied. “We wanted to develop a lightweight device that – unlike existing virtual-reality gloves – doesn’t require a bulky exoskeleton, pumps or very thick cables,” comments Herbert Shea, Head of EPFL’s Soft Transducers Laboratory (LMTS). According to the press release, the glove has thus far been successfully tested on volunteers in the city of Zurich and is expected to be presented at the ACM Symposium on User Interface Software and Technology (UIST) this month.

















